Công nghệ










Điện, điện tử, công nghệ thông tin
-

Phần mềm Quản lý bệnh viện
Giá tham khảo: Liên hệ -

Giải pháp giám sát nhiệt độ độ ẩm kho hàng hóa qua Internet
Giá tham khảo: Liên hệ -

Phần mềm trạm trộn bê tông
Giá tham khảo: Liên hệ -

Giải pháp giám sát tự động môi trường nhà nấm
Giá tham khảo: Liên hệ
Trí tuệ nhân tạo AI
-

CCTV thông minh ứng dụng trí tuệ nhân tạo và công nghệ nhận dạng đối tượng
Giá tham khảo: Liên hệ -
Phần mềm Kế toán Aizen
Giá tham khảo: Liên hệ -

Phần mềm phân tích cuộc gọi ứng dụng công nghệ trí tuệ nhân tạo OMI AI Voice Analysis
Giá tham khảo: Liên hệ

Cơ khí
-

Công nghệ đúc sơ-mi bằng phương pháp đúc ly tâm
Giá tham khảo: Liên hệ -

Công nghệ xử lý tro – xỉ
Giá tham khảo: Liên hệ -

Công nghệ chế tạo thiết bị tuyển khoáng và xử lý chất thải rắn
Giá tham khảo: Liên hệ -

Công nghệ thí nghiệm tuyển khoáng và xử lý chất thải rắn
Giá tham khảo: Liên hệ
Vật liệu và luyện kim
-

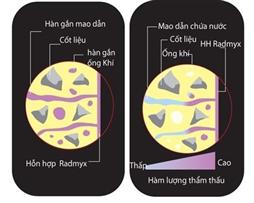
Công nghệ sơn chống thấm mao dẫn Radmyx
Giá tham khảo: Liên hệ -
Công nghệ sơn chống thấm và hoàn thiện Tecma Silicatos
Giá tham khảo: Liên hệ -

Công nghệ chế biến tro bay
Giá tham khảo: Liên hệ -

Công nghệ chế tạo bê tông thành mỏng đúc sẵn
Giá tham khảo: Liên hệ
Y học
-
Phần mềm Quản lý bệnh viện
Giá tham khảo: Liên hệ -

Công nghệ Laser - picoseconds chuyên điều trị các bệnh lý sắc tố da, nám, tàn nhang, đồi mồi
Giá tham khảo: Liên hệ -

Công nghệ xử lý nước thải Phòng khám, Bệnh viện
Giá tham khảo: Liên hệ -
Phần mềm quản lý bệnh viện EHIS
Giá tham khảo: Liên hệ
Môi trường
-

CÔNG NGHỆ XỬ LÝ NƯỚC THẢI CHĂN NUÔI BẰNG PHƯƠNG PHÁP SINH HỌC KẾT HỢP LỌC MÀNG VI LỌC
Giá tham khảo: Liên hệ -
CÔNG NGHỆ XỬ LÝ NƯỚC THẢI SỬ DỤNG VẬT LIỆU ĐỆM VI SINH CHUYỂN ĐỘNG
Giá tham khảo: Liên hệ -

Công nghệ sấy bã sắn
Giá tham khảo: Liên hệ -
Giải pháp giám sát tự động môi trường nhà nấm
Giá tham khảo: Liên hệ
Công nghệ sinh học
-

Công nghệ sản xuất chế phẩm sinh học Lectin từ cây tỏi
Giá tham khảo: Liên hệ -

Công nghệ sản xuất bột phlorotamin từ rong nâu
Giá tham khảo: Liên hệ -

Công nghệ sản xuất bột Polyphenol, Chlorophyll từ cây bắp
Giá tham khảo: Liên hệ -

Công nghệ sản xuất N-Acetyl-D-Glucosamine từ nguồn phế liệu vỏ tôm bằng biện pháp sinh học
Giá tham khảo: Liên hệ
Công nghệ Nano
-

Phần mềm kiểm tra góc-kích cỡ, đối ứng với đa camera EI310
Giá tham khảo: Liên hệ -

Công nghệ nano và công nghệ lượng tử ứng dụng trong y sinh
Giá tham khảo: 1.000.000.000 VND -

Nền tảng quản lý QR code xác thực truy xuất thông tin nông sản
Giá tham khảo: Liên hệ -

Giải pháp truy xuất nguồn gốc và chống giả cho nông sản ứng dụng công nghệ lượng tử nano
Giá tham khảo: Liên hệ
Công nghệ thực phẩm
-
Công nghệ sấy tổ yến đã qua sơ chế
Giá tham khảo: Liên hệ -

Công nghệ sấy FD ứng dụng trong chế biến rau quả, thực phẩm
Giá tham khảo: Liên hệ -
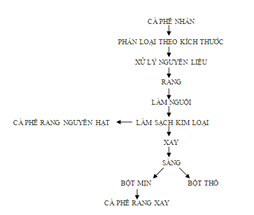
Công nghệ sản xuất Pectin từ vỏ cà phê
Giá tham khảo: Liên hệ -

Công nghệ chế biến không dùng nhiệt HPP
Giá tham khảo: Liên hệ
Dược học
-
Giải pháp giám sát nhiệt độ độ ẩm kho hàng hóa qua Internet
Giá tham khảo: Liên hệ -

Giải pháp giám sát nhiệt độ, độ ẩm xe chở hàng hóa qua internet
Giá tham khảo: Liên hệ -
Phần mềm kiểm tra góc-kích cỡ, đối ứng với đa camera EI310
Giá tham khảo: Liên hệ -

Công nghệ phân tách huyết tương giàu tiểu cầu 5PRP kit
Giá tham khảo: Liên hệ
Trồng trọt
-

Công nghệ trồng trọt ứng dụng nông nghiệp công nghệ cao
Giá tham khảo: Liên hệ -

Quy trình canh tác rau hữu cơ
Giá tham khảo: Liên hệ -

Công nghệ Coating hạt giống
Giá tham khảo: Liên hệ -

Công nghệ sản xuất giấm gỗ
Giá tham khảo: Liên hệ
Chăn nuôi
-

Công nghệ nuôi tôm siêu thâm canh trong nhà màng
Giá tham khảo: Liên hệ -
Công nghệ sấy bã sắn
Giá tham khảo: Liên hệ -
Giải pháp giám sát nhiệt độ, độ ẩm xe chở hàng hóa qua internet
Giá tham khảo: Liên hệ -
Công nghệ nano và công nghệ lượng tử ứng dụng trong y sinh
Giá tham khảo: 1.000.000.000 VND
Lâm nghiệp
-
Giải pháp giám sát tự động môi trường nhà nấm
Giá tham khảo: Liên hệ -
Nền tảng quản lý QR code xác thực truy xuất thông tin nông sản
Giá tham khảo: Liên hệ -
Giải pháp truy xuất nguồn gốc và chống giả cho nông sản ứng dụng công nghệ lượng tử nano
Giá tham khảo: Liên hệ
Thuỷ sản
-
Công nghệ nuôi tôm siêu thâm canh trong nhà màng
Giá tham khảo: Liên hệ -
Công nghệ chế biến không dùng nhiệt HPP
Giá tham khảo: Liên hệ -

CÔNG NGHỆ NUÔI VÀ PHÁT TRIỂN CÁ KOI
Giá tham khảo: Liên hệ -

Giải pháp giám sát, cảnh báo môi trường nước mặt trên sông online qua Internet
Giá tham khảo: Liên hệ
Dữ liệu và thống kê
-

Nền tảng tích hợp trung tâm DeepPro Gateway ứng dụng công nghệ blockchain, AI, IoT
Giá tham khảo: Liên hệ -

Giải pháp truy xuất nguồn gốc dựa trên công nghệ số DeepTrace
Giá tham khảo: Liên hệ -

Giải pháp trí tuệ nhân tạo giúp doanh nghiệp tự động hóa các quy trình Deep AI Agent
Giá tham khảo: Liên hệ


Kỹ thuật công trình xây dựng
-
Cầu phao lắp ghép
Giá tham khảo: Liên hệ -

Công nghệ sản xuất Panel
Giá tham khảo: Liên hệ -

Giải pháp LIGHTFRAME xây dựng dân dụng
Giá tham khảo: Liên hệ

